Autonomous robot dogs are highly advanced machines that are transforming the manufacturing industry. These specialized robotic innovations are being used to tackle complex challenges in production, maintenance, and logistics.
These versatile machines are designed to navigate intricate environments. They replicate the movements of real dogs, utilizing state-of-the-art sensors, cameras, and software, which enables them to perform tasks that require mobility, dexterity, and decision-making in dynamic conditions.
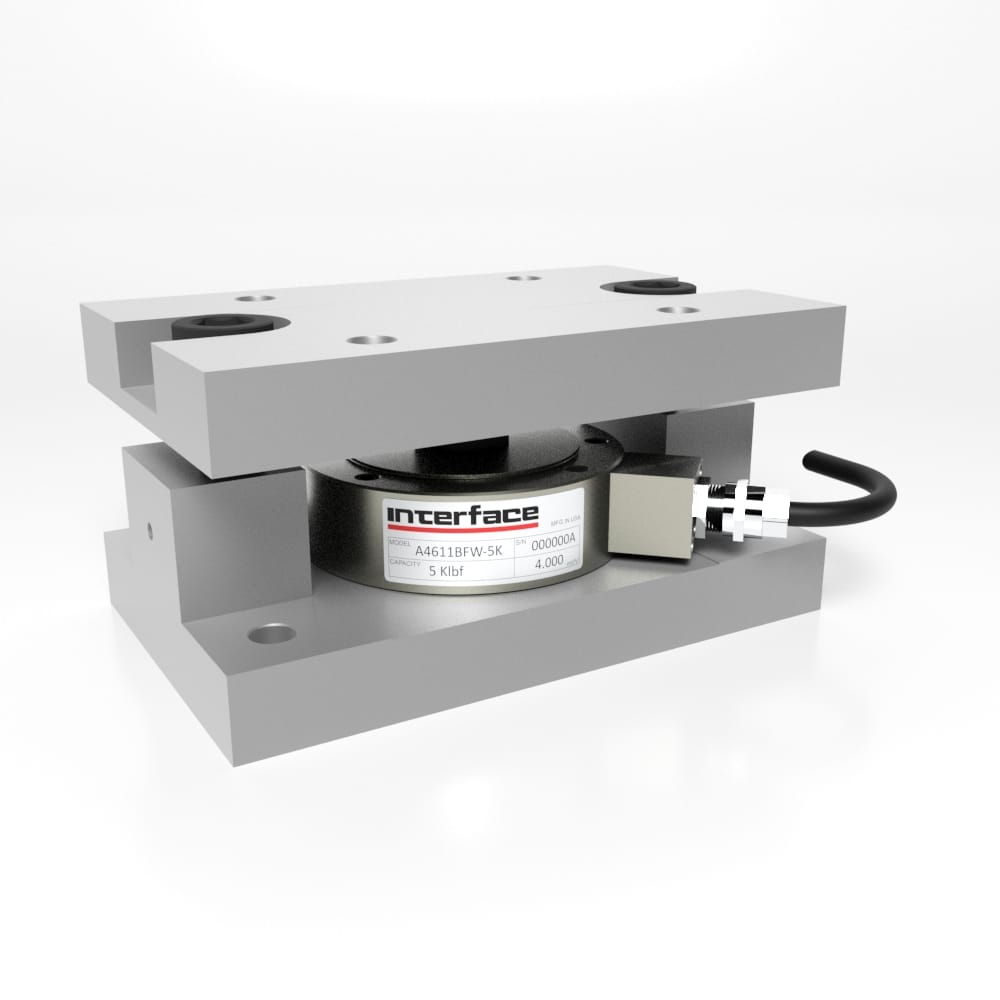
Interface products aid in the development and testing of robotic dogs, providing precise measurements for performance analysis.
By integrating Interface’s advanced force measurement technologies into robot dogs, manufacturers can achieve higher precision and functionality, enhancing the overall performance of their robots.
Types of Interface Products Used in Robotic Dogs
- Load cell force data can help to adjust grip strength, ensuring they apply just the right amount of force without damaging either the item or themselves.
- Load button load cells integrated into the robot’s feet measure ground contact forces, which are crucial for assessing stability and balance.
- Multi-axis sensors capture complex force and torque data during dynamic movements, aiding in locomotion optimization and stress analysis.
- Wireless instruments enable real-time data transmission, facilitating field testing and performance monitoring.
- Mini Load Cells provide data to autonomously adjust their movement and force application when lifting or moving a component.
These technologies collectively contribute to evaluating stability, analyzing movements, assessing performance across terrains, and ensuring the robot’s long-term durability.
Robotics Dogs Use Cases in Manufacturing
Robotic dogs are already being deployed in manufacturing environments for various tasks, including quality monitoring, inventory management, security, and safety checks. The following highlights the use of robotic dogs in various manufacturing functions.
#1 Inspection and Monitoring: By utilizing Interface’s force sensors, robot dogs can be programmed to measure the forces acting on machinery or products, allowing them to detect subtle changes in force or pressure that may indicate potential issues.
#2 Object and Material Handling: Force sensors can be used to accurately measure the amount of force applied by the robot dog when it handles or manipulates objects. This ensures that delicate materials are not damaged and heavy items are handled safely.
#3 Predictive and Routine Maintenance: By integrating load cells and force sensors, robot dogs can collect valuable data that can be used for predictive maintenance. For instance, the sensors can monitor the performance of various machines in the facility, recording changes in force or load that may indicate wear and tear. This data can be analyzed to predict when maintenance is needed, preventing equipment failure and reducing costly downtime.
#4 Security Patrols: Robotic dogs provide continuous, mobile surveillance in diverse environments, enabling them to detect anomalies and navigate challenging terrains, thereby increasing security efficiency. They can patrol hazardous areas, reducing human risk, and are used in military, industrial, and private security settings for persistent monitoring.
#5 Hazardous Environments: Robotic dogs excel in hazardous environments by remotely navigating and inspecting dangerous areas, minimizing human risk. Equipped with sensors and cameras, they collect vital data from facilities, thereby enhancing safety and enabling informed decisions without requiring direct human exposure.
The combination of autonomous robot dogs and Interface’s advanced load cells and force sensors represents a powerful leap forward in the manufacturing industry. As the world continues to move toward more automated and intelligent manufacturing processes, the role of autonomous robot dogs will become increasingly critical, with Interface sensors playing a key role in ensuring precision and reliability.


 6-Axis Force Plate Robotic Arm
6-Axis Force Plate Robotic Arm Bolt Fastening- Force
Bolt Fastening- Force Chemical Reaction-Mixing
Chemical Reaction-Mixing Friction Testing
Friction Testing Harness Durability Testing
Harness Durability Testing Industrial Robotic Arm
Industrial Robotic Arm Lifting Heavy Objects
Lifting Heavy Objects Press Load Monitoring
Press Load Monitoring








Nothing Found
Sorry, no posts matched your criteria